Abstract
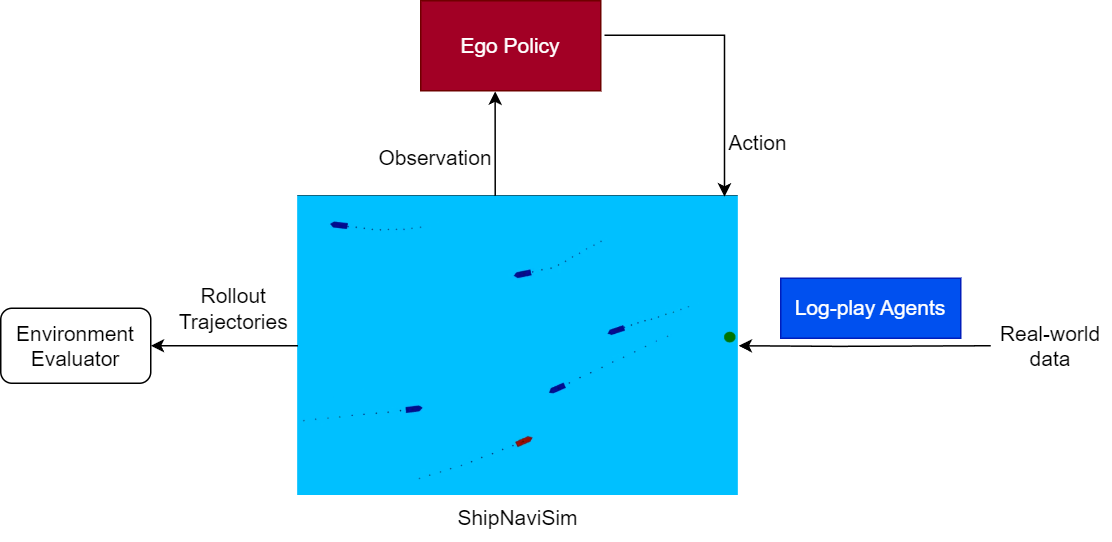
Maritime traffic management in busy ports faces growing challenges due to increased vessel traffic and complex waterway interactions. Strategies such as e-navigation by the International Maritime Organization aim to enhance navigation safety through traffic digitization. Maritime traffic simulation is essential for these systems, offering a virtual environment to model, analyze, and optimize traffic flows. Unlike road traffic, there are few simulators for maritime traffic, and they often lack realism and multi-ship interactions. In this paper, we (a) present ShipNaviSim, a data-driven maritime traffic simulator that utilizes a large-scale dataset over 2 years and electronic navigation charts to model vessel movements in Singapore Strait, one of the busiest ports in the world; (b) implement and evaluate different imitation learning algorithms such as behavior cloning to learn a policy that can accurately simulate real world vessel movements and multi-ship interactions; (c) develop vessel-specific metrics such as trajectory curvature, near miss rate, to validate the learned policy's alignment with human expert data. Extensive testing shows that our learned agents can behave like human experts, and thus can be used with the simulator for recommending routes for vessels in a hotspot region or generating diverse traffic scenarios to benchmark navigation systems.
Demo Videos
We provided some videos showing vessel trajectories when deploying our learned Behavior Cloning (BC) policy in ShipNaviSim.
- Blue vessels follow static AIS logs.
- Red line shows BC policy path.
- Green line represents reference trajectory.
- Yellow star marks the goal destination.
Single-agent scenarios
BC policy can control the ego vessel smoother than in log data while reaching the goal at the same time or faster (Scenarios 1 and 2). It also can make safer decisions to avoid near misses (Scenarios 3-5).Scenario 1
Scenario 2
Scenario 3
Scenario 4
Scenario 5
Multi-agent scenarios
In multi-agent setting, all vessels in the planning area at the first step are controlled by BC policy. The videos stop when all agents reach their goals.
Scenario 1
Scenario 2
Scenario 3
Scenario 4
Scenario 5
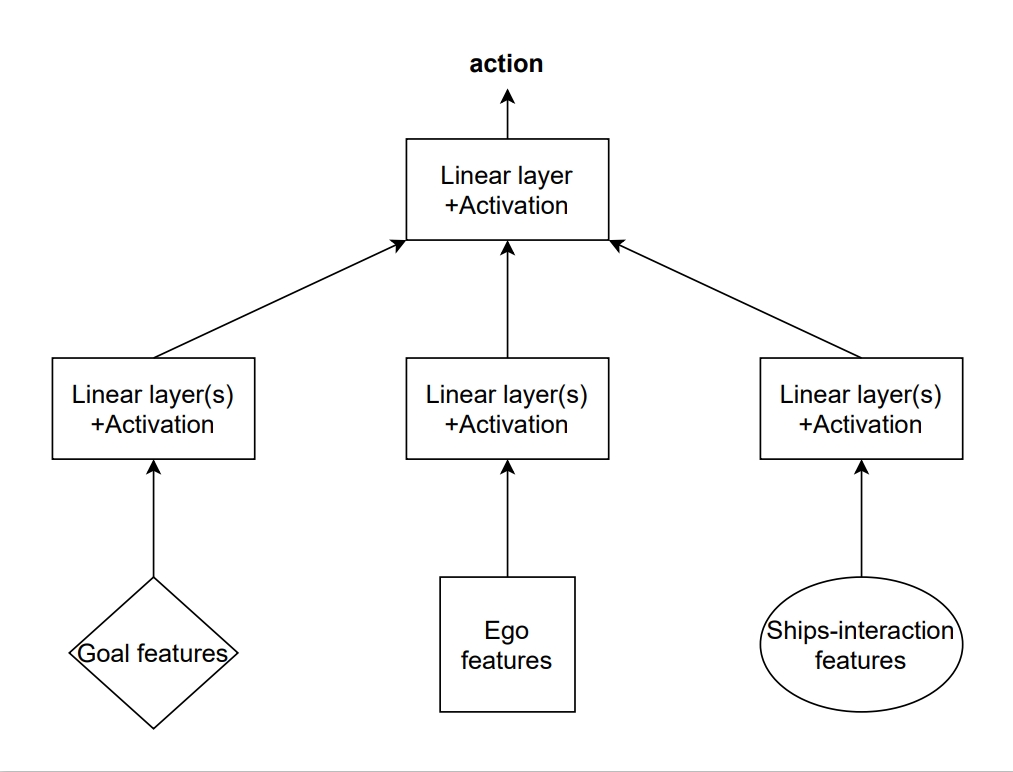
The importance of ship-interaction features
We show visualizations that show learned policy, which does not take nearby vessel information as input, causes many unsafe scenarios.BC without nearby-vessel features
BC
BC without nearby-vessel features
BC
BC without nearby-vessel features
BC